Rekao bih da biraš ono tako da ti u najgorem slučaju min prozor bude na rubovima.
Npr. ako imaš 8×8 prozor s 2×2 blokom, d ti je 3, uzimaš \lfloor \frac{d + 1}{2} \rfloor jer u slučaju da ti je minimum odmaknut 2 , onda sljedeći gledaš odmaknut za 1, a to će ti biti rub prozora pretraživanja. U slučaju kad bi imao 9×9 s 2×2 prozorom, onda ti je d = 4, i tad opet možeš dobiti rub prozora s početnim s = 2, sljedeći s će biti 1, i opet worst case scenarij je rub (s one kraće strane).
Tako da moj guess je da mora vrijediti svojstvo da \sum{s_i} \leq d_{min}, a pošto vrijedi da je s_{i + 1} = \lfloor \frac{s_i}{2} \rfloor , onda ti s_{-1} mora biti d + 1 ili manje, pa je tako s_0 = \lfloor \frac{d_{min} + 1}{2} \rfloor kako bi osigurali da pregledavamo cijeli prozor.
Ako se radi o slučaju da smijemo popunjavati nulama, onda bi izraz bio s_0 = \lfloor \frac{d_{min} + 1}{2} \rfloor + (d_{max} - d_{min}). Time ćemo dobiti da provjeravamo cijeli prozor i u najgorem slučaju (npr. kad imamo asimetrične d-ove), a ako izađemo iz prozora lako samo kažemo da su to nul-blokovi. Ovo bi bio slučaj kad blok ne bi bio centriran (npr. kad su dimenzije prozora i bloka paran i neparan broj).
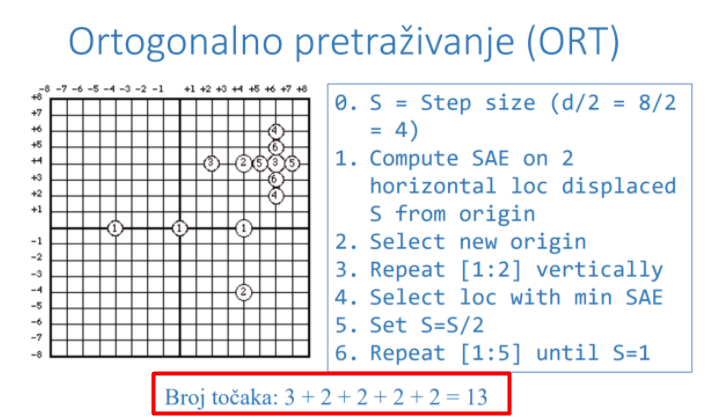
Tj ovo je bar moja logika koja se bazira na tome da nema apsolutno nikakvog smisla imati veći prozor pretraživanja za ORT i LOG ako nećeš potencijalno iskoristiti sve vrijednosti. A ako se kaže da je s_0 = \lfloor \frac{d}{2} \rfloor, onda za 8×8, 2×2 slučaj nikad nećeš pregledati dalje od okoline 1 bloka, dakle prozor bi ti komotno mogao biti 4×4 i ne bi bilo razlike u rezultatima.